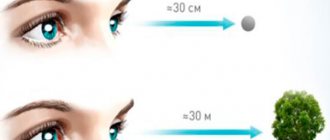
Humans, like primates, have evolved an incredible visual system that allows them to see the world in three dimensions and judge distances with a high degree of accuracy.
Our eyes are located a short distance apart on the front of the face, while in many animals the organs of vision occupy a position on either side of the head. Despite this, our eyes also see the same image slightly differently (monocular vision), but thanks to the special properties of our brain to unify the image, they give the perception of depth and volume of objects. This creation of a single image is called “binocular vision.”
Formation
The development of some organs in humans, due to their complex structure and functions, does not end immediately after birth. Binocular vision requires a certain development of higher nervous activity, so the final formation of this function is expected before the age of 15, in addition, the optical system must have the following characteristics:
- visual acuity of at least 0.4 diopters, providing a clear image on the retina;
- normal tone and full range of movement of the oculomotor muscles, with the help of which the parallel alignment of the visual axes is ensured.
Thanks to this position, the rays are projected into the central recess of the retina;
- same refraction in both eyes. With a difference of 4-5%, binocular vision becomes impossible;
- normal accommodation, convergence and divergence for displacement of optical axes;
- full development of the retina;
- complete symmetry of the location of the eyes. If any of them is displaced due to injury, tumor, hematoma, inflammatory infiltrate, then the combination of visual fields becomes difficult and stereoscopic vision is impaired.
Advantage
Binocular vision was formed in humans during evolution under the influence of the environment. It was much more important for his survival to see what was happening behind the foliage and bushes than what was happening behind him. Part of the view is closed to one eye, part to the other, but when the images are combined, a “miracle” occurs and we actually see “through” the obstacle. The straighter the eyes are set, the larger the area in which the images overlap and the larger the area of our “X-ray” vision.
How it works
Three-dimensional vision in humans provides a special mechanism for merging images received by each eye separately. This mechanism is called fusion.
Symmetrical image projection points give a three-dimensional effect
Combining the image from both eyes is carried out mainly if it hits the same points on the retina. In addition to the central recess, these should also be points symmetrically distant from it. Only under the condition of projection in the right and left eyes to identical corresponding points is a normal image constructed; if the projection is not symmetrical (projection points are disparate), then the image will double, and diplopia occurs.
The binocular nature of the visual function gives us a stereoscopic (volumetric) picture, this is how we evaluate the distances and relative positions of objects, their relief and texture.
Impairment of binocular vision can manifest itself in the form of vision with one eye - monocular vision (the image becomes two-dimensional, flat) or in the form of simultaneous vision (the brain alternately reads signals from one or the other eye). In this case, only information about the parameters of the height, width and shape of the object becomes available, without spatial characteristics.
Binocular vision disorder occurs as a consequence of strabismus, astigmatism, and amblyopia.
Concept of stereoscopic vision
Stereoscopic (binocular) vision is a functional feature of the visual apparatus that allows you to see objects, their shape and size, including in different planes. This ability is inherent in every person and distinguishes him from many other species, which are characterized by the perception of the surrounding world with one eye - monocular (in birds, fish). With stereoscopic vision, we not only see an object, but also determine the distance to it and establish its approximate dimensions.
It is possible to estimate the depth of space due to several mechanisms. So, by comparing the angular value, the eyes determine which object is further away and which one is closer. Also, distance is determined using a feature called “parallax” of motion. An example of “parallax” is a situation when we are on a moving train and it seems to us that nearby objects are moving much faster than distant ones.
In other words, stereoscopic vision helps to navigate in space. Without it, it is impossible to feel safe, work in many areas, or play sports. Binocular vision is formed from the age of two, when the child begins to perceive the world in a three-dimensional image.
Reasons for violation
An important component of correct binocular vision is the parallel alignment of the optical axes of the two eyes - orthophoria. But in practice, there is often a slight heterophoria (Greek geteros - other). Due to different tone of the extraocular muscles, the visual axes can deviate slightly in any direction: up, down, inward or outward. This muscle imbalance is small; binocular vision can be restored thanks to the compensatory action of the fusion reflex. As soon as physiological double vision occurs, the brain gives a command to correct the tone of the necessary extraocular muscles and a unified perception of the image is restored.
Impairment of the extraocular muscles, manifested as strabismus, can lead to loss of binocular vision. Monocular strabismus (squints one eye) leads to the exclusion of this eye from the visual act, and the brain reads information only from the healthy one. A severe case that is practically impossible to correct visual function is paralytic strabismus.
But if the strabismus is friendly (with the full range of movement of the eyeballs preserved), then binocularity is preserved.
Other reasons lie in the plane of the nervous regulation of visual function - from a violation of the fusion reflex to damage to the brain structures responsible for “converging” the image.
Binocular vision disorders
To see the world three-dimensionally, coordinated work of the muscles of each eye and synchronization of movements of the eyeballs are important. A person can see images clearly and three-dimensionally in the absence of strabismus, lens pathologies, or retinal disorders. Visual acuity should be the same.
Impaired binocular vision can be caused by various eye pathologies, brain diseases, skull injuries, neoplasms, etc. Only an ophthalmologist can determine the exact cause of binocular impairment.
The first test of binocularity is carried out when the child turns 3 years old. With the help of the study, it is possible to promptly identify eye pathologies, such as strabismus, and promptly begin treatment.
The main factor that leads to disruption of three-dimensional perception is strabismus. It may appear at birth or be acquired. This deviation can be corrected with the help of corrective glasses, gymnastics, and surgical interventions.
To identify a violation, you can conduct a simple self-diagnosis. You can do the test using the book. To do this, you need to open it and bring the pencil to your nose, without taking your eyes off it, and try to read the line. If your vision is normal, this task is not difficult to cope with.
Diagnostics
Studying binocular vision is a fairly easy procedure that can be carried out even independently, without using any device.
The test is performed by applying light pressure on the eye through the upper eyelid in an open position. If double vision (picture displacement) appears, this confirms the presence of binocular vision. This test is based on the mechanical displacement of the projection of an object onto an asymmetrical area of the retina relative to the second eye.
You can also use the “missing” method (Kalf method) to study binocular vision. The subject and the assistant (doctor) each take a pencil and hold them vertically. In this position, the patient must quickly hit the doctor's pencil. This can be done if you have binocular vision.
The “through the palm” vision test using the Sokolov method is based on the phenomenon of combining visual fields. One eye sees the image through a rolled-up piece of paper or newspaper, and the other is covered with the palm of the hand.
By combining visual fields, a person will be able to see “through” his hand those objects that are visible to the eye through a tube
How to test binocular vision using eye movement? The subject is asked to fix his gaze on some object. Then one eye closes. If a person has hidden strabismus, the covered eye will deviate to the side. After the hand is removed, a person with binocular vision will experience an adjustment movement that helps restore symmetrical perception of the image. If such movement is slow or absent at all, this indicates weak binocular vision or its simultaneous nature.
Hardware methods
To more accurately determine monocular and binocular vision, whether it is stable or unstable, hardware determination methods are used. For example, the use of a synoptophore device, on which a color test is carried out, is widely known. Its design uses a screen on which several dots change their position: white, red and a couple of green ones. The subject looks at the screen through special glasses. The right glass is red, and the left glass is green. By changing the position of the points and focusing on the responses of the subject, it is possible to establish the nature of vision and which eye is the dominant one.
Color test option
Stereoscopic vision. Stereoscopic effect. Stereoscopic measurement
Stereoscopic vision
To achieve the main goal - determining the coordinates of terrain points from photos, you need to measure them. Perhaps this is one of the senses given by nature - vision.
The human eye is a complex device and has a shape approaching a ball (radius approximately 12 mm). (1)The surface of the eye consists of 3 membranes. The outer protective covering of the eye (sclera), which meets the cornea at the front of the eye. (10) (2) the choroid, which in the anterior part becomes the iris (9). In front of the iris is the pupil (diameter 308 mm). It plays the role of a diaphragm, therefore, regulates the amount of light entering the eye. (3) The retina consists of photoreceptors, that is, light-sensitive elements that consist of cones and rods. They transmit their irritation through the brain. Rods are sensitive to weak twilight lighting, cones are sensitive to bright daylight and have photosensitivity. The place where the optic nerve enters the retina is the blind spot (7), and since this place has neither cones nor shelves, it is not irritated, that is, it does not react to light.
In the middle of the retina there is a macula macula, the central recess of the central macula consists of only cones. The lens is located in front of the eye behind the pupil; it is a biconvex lens. It builds a real inverse reduced image of the observed object.
The sharpness of the image on the retina is achieved by means of accommodation. And the closer the object in question is, the greater the curvature of the lens should be. Accommodation is carried out by the eye muscles (8); they are not tense if the object in question is at a distance from 10 meters to infinity.
In the case when the muscles are not tense, the focal length is approximately 16 mm, and 25 cm is the distance of best vision.
The space between the cornea and the lens is filled with aqueous humor. Between the lens and the retina, vitreous fluid fills.
The ray passing through the center of the macula and the posterior nodal point of the eye is the visual axis of the eye. And the straight line through the center of the cornea and lens is called the optical axis. The angle between these two axes is approximately 5 degrees. Field of view – 150 degrees horizontal and 150 degrees vertical.
Those objects that fall on the central fovea of the retina (5) are visible better. The angle at which the diameter of the central fovea of the macula is visible from the corner point of the lens is equal to the angle of distinct vision, 1.5 degrees.
Irritation of rods and cones by light occurs if the wavelength of electromagnetic radiation is in the visible range. Maximum sensitivity in the yellow spectrum.
There is a static and dynamic theory of vision. In dynamic vision, eye movements play an important role - voluntary and non-voluntary. Not voluntary - trembling - vibrations of the eye at a speed of 20 vibrations per second. Oscillations are rapid rotations at a speed of 6 thousand vibrations per second. Slow movements – 1 movement per second.
There are 2 types of vision – monocular and binocular. In monocular vision, the eye is rotated so that the image of the object appears in the recess of the macula. The intersection of the visual axis of the eye with the object under consideration is called the point of fixation of monocular vision. For optical observations, visual acuity plays an important role - the ability to distinguish parallels at the minimum angle at which the observer still sees two points separately - this is the angle of acuity of the first kind. For a normal eye it is approximately 45 minutes. Type 2 monocular visual acuity is the minimum angle at which the human eye sees two parallel identical lines. It is equal to 20 minutes.
Stereoscopic vision. This spatial perception that occurs when viewing an object with two eyes is binocular vision. In this case, the observer positions the eyes so that the image appears in the central fovea of the retinas of both eyes.
Stereoscopic effect
Let's imagine that the previously used spatial points A and D are recorded by two cameras with a focal length f located at the ends of the shooting basis B=br (Fig. 1). In the plane of negatives, points A and D will be represented by points a1 and a2, d1 and d2, respectively. The direction of the projecting rays, and therefore the values of the angles, will remain the same as when observing these points by a person.
Rice. 1. Geometric interpretation of the principle of stereoscopic vision: br - ocular basis; A - point of fixation of binocular gaze; S1A and S2A - rays; — convergence angle, = S1AS2; NA — distance of the fixation point from the ocular base; D is a point distant from point A in depth by a certain value at which these points are perceived to be at different distances. It is approximately 30″. The value can be determined by the formula: If the real points A and D are replaced by a pair of positive images and so that the left eye of the observer sees only the left image, and the right eye only the right image, the situation on the retina will arise that existed when these points were directly observed. The observer will perceive a pair of flat images spatially. This perception is called the direct stereo effect, and the imaginary spatial image of the photographed object, perceived by the observer, is called a stereoscopic model (stereomodel). The stereo model will be observed only within the overlap of the images. Two adjacent partially overlapping images obtained from the ends of a certain basis are called a stereo pair, or a pair of images. Now, obviously, the requirement to ensure a certain longitudinal overlap of images has become clearer (approximately 60% when shooting a plain). Reducing the overlap can lead to the risk of gaps between stereo models and, accordingly, to the complexity or impossibility of obtaining three-dimensional metric information from images. Increasing the overlap will reduce the intersection angles of the observed points, which will lead to a decrease in accuracy in determining the differences in their distances (exceedances). If the pictures in front of your eyes are swapped, then the observer will also see a stereo model, but with the opposite stereo effect - distant elements of the landscape will be perceived as close, and vice versa, close elements will seem distant. This version of stereoscopic observation of images is used in the analysis of negative microforms of relief (ravines, ditches, ditches, etc.). There may be another option for observing a pair of images, in which both images are rotated 90° in their plane. In this case, the observer, regardless of the relief, will see a flat plastic image of the area. The stereo effect obtained in this case is called zero. The accuracy (detail) of stereoscopic perception from photographs of elements of spatial objects depends, as already noted, on the angle of intersection of these elements. The value of the angle is determined by the size of the basis B and the shooting height H. The accuracy of perception of the stereo model also depends on the viewing conditions of the images. Minimum difference in distances (heights) of observed points for the distance of best vision (250 mm) where v is the magnification of the stereo device; b - survey basis on the scale of images. Using this formula, we will calculate for observing images obtained from certain heights, most used in land management and cadastral work, as well as in remote sensing. In this case, we will assume that photographs of a format of 18 x 18 cm with a longitudinal overlap of 60% are observed using a stereoscope with one and a half times magnification. At shooting altitudes of 500, 1000, 2000 and 5000 m, the values will be 0.2, 0.3, 0.7 and 1.7 m, respectively. For images obtained from space platforms from an altitude of 300 and 900 km, the values will be 102, respectively and 310 m. The accuracy of perception of excesses when observing satellite images can be increased by increasing the survey basis. This can be done by increasing the image field angle of the shooting system or using convergent shooting. In the first case, there may be options: increasing the frame format or decreasing the focal length of the shooting camera. The latter option will lead to a decrease in the shooting scale and geometric resolution of the images.
Stereoscopic measurement
For stereoscopic measurement of images, two methods are used: an imaginary mark and a real mark.
The imaginary mark method (Fig. 4, a), proposed by F. Stolz (Germany) in 1892, is based on the fact that the same image of a measuring mark is projected onto each image of a stereo pair. As a result, the observer sees with each eye the area of the image with the mark. Since the marks have the same shape, size and color, when approaching the corresponding points they merge into one imaginary stereoscopic mark. When the marks are combined with the corresponding points (m and m'), the stereoscopic mark will be perceived as lying on the surface of the stereo model at point M. When, for example, the right mark is shifted from point m' to point k', the stereoscopic mark will be perceived as moving in height in the space of the stereo model with points M to point K. Consequently, by moving both marks across the images and combining them with the corresponding points, it is possible to measure the coordinates of the points in the spatial coordinate system of the model. This method was used by K. Pulfrich in the construction of a stereocomparator, the first stereophotogrammetric device, and is used in most stereophotogrammetric instruments and systems.
The real mark method (Fig. 4, b), proposed by the Canadian photogrammetrist E. Deville in 1902, consists in introducing a screen into the space of the stereo model, which has a luminous point in the center, which serves as a real measuring mark. This method has not found wide application in photogrammetry.
The operator sets the shape, size and color of the measuring mark taking into account the characteristics of the observed images. The stamp forms used are cross, dot, ring, etc. The color of the stamp is set depending on the color of the photographs. When measuring black and white photographs, it is better to set the brand color to yellow or light green, since these colors allow you to clearly see the brand in dark areas and do not tire your eyes. In light areas you can use blue. When using the anaglyph method, the color of the stamp must be yellow, white or black.
Literature
- Lobanov A.N. – Photogrammetry – 1984;
- Nazarov A.S. Photogrammetry: textbook. manual for university students. - Mn.: TetraSystems, 2006. - 368 p.: ill.;
Restoring normal vision
Impaired binocular vision can be restored with diploptic exercises. Their main task is to develop the ability to merge two images.
Exercises with prisms: promotes the development and strengthening of the bifixation reflex - the intersection of the optical axes of both eyes on an object.
Method T.P.Kashchenko
Training in merging successive images from the fovea of both eyes. In turn, each eye is shown an image containing an element of the other, intended for the second eye. Patients are then asked to combine these images.